Following are brief descriptions of current or recent projects directed by NSL investigators. Please feel free to contact the responsible faculty member for more details, related publications, etc.

Wind Measurement Using Small UAS (Woolsey)
Small fixed-wing and multirotor aircraft operating in the atmospheric boundary layer can provide wind measurements on spatial and temporal scales of interest to atmospheric scientists. Of particular interest are applications requiring aggressive maneuvering (to track a rapidly varying flow feature, for example) where the nonlinear flight dynamics impact control and estimation.
John Coggin (standing), Senior Research Associate, ICTAS, works with Aerospace Engineering students Mark Palframan (dark hair) and Chris Kevorkian to prepare the unmanned aerial vehicle SPARRO for a test flight. Drones, research, Kentland Farm, science, flight.

Intelligent Visual Tracking (Woolsey)
Vision-based methods for detecting and avoiding other aircraft will support the safe, autonomous operation of small UAS at low altitude. These methods can also enhance counter-UAS capabilities where needed. Ongoing work aims to mimic the peripheral-plus-central vision capability of humans to maintain overall situational awareness while characterizing specific hazards detected in the field of view.
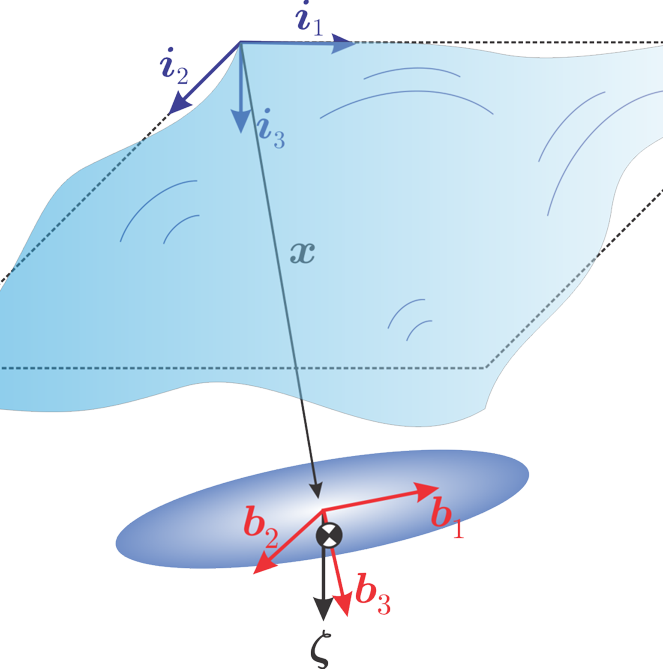
Control of Submerged Vessels in Waves (Woolsey)
The forces and moments acting on a submerged vessel moving near the free surface are strongly influenced by external waves and also by the waves generated by the vessel’s own motion. A Lagrangian mechanics model that captures the essential physics of maneuvering in a seaway would enable the design of model-based controllers that enable more precise and effective motion control.
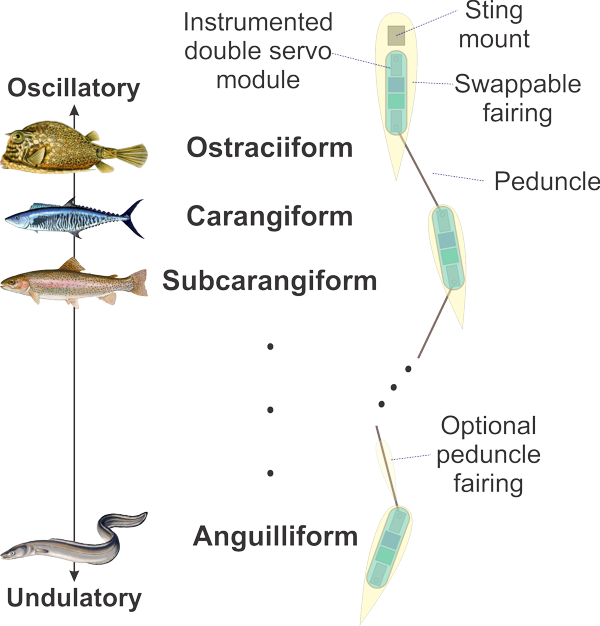
Biomimetic Propulsion and Control (Woolsey)
While bound by the same physical laws that govern engineered systems, creatures exhibit astonishing capabilities for speed, agility, stealth, robustness, and efficiency. Focusing on the case of pisciform (“fish-like”) locomotion, this effort aims to develop low-dimensional, state space models for unsteady flow effects and to incorporate these models in a geometric control framework that enables the design of optimum morphologies and gaits.

Reliability Analysis of UAS Flight Control Systems (Farhood)
This project focuses on the design of reliable control systems that guarantee safe operation of autonomous UAS. Reliability is ensured by validating the control systems in the sense that these systems are shown to function correctly throughout the flight envelope under various possible uncertainties and exogenous disturbances.
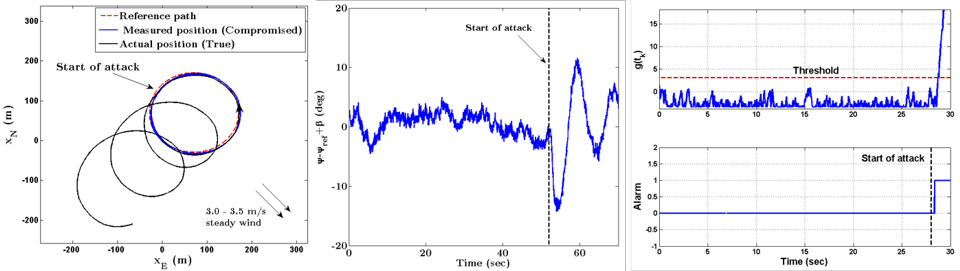
Security Aware Control Algorithms for UAS (Farhood)
This project focuses on designing secure control systems for UAS by ensuring resilience against malicious cyber-physical attacks at both the cyber and physical layers. The work involves the development of systematic methods and procedures for detection and mitigation of malicious attacks against UAS, such as sensor spoofing attacks, actuator attacks, malware attacks, and attacks on the communication network.
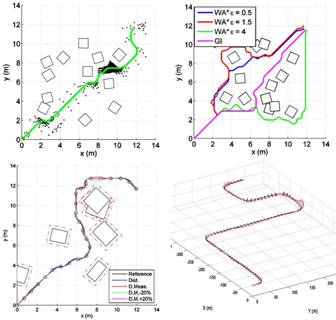
Motion Planning and Control for Agile Vehicles(Farhood)
This project focuses on developing an integrated approach for motion planning and control of highly-maneuverable vehicles using pre-specified motion primitives.
Distributed Control of Complex Engineering Systems (Farhood)
This project aims at developing systematic control design algorithms and advanced computational tools for high-performance systems interconnected over general graph structures. The control systems of interest are spatially distributed with the controller sensing and actuation topology inherited from that of the plant. The goal is to integrate robust feedback control methods into the design and construction of distributed systems over arbitrary graphs to ensure stable networks with satisfactory performance despite communication latency and packet loss, exogenous disturbances, and measurement noise.